The International Aerial Robotics Competition's
The International Aerial Robotics Competition (IARC) is the longest running Association for Unmanned Vehicle Systems International (AUVSI) university student competition, celebrating its quarter century anniversary in 2016. The IARC was the first AUVSI competition, and in a very real sense, spawned all other AUVSI competitions while instilling the pervasive theme of “full autonomy in mobile robotics”. The IARC is also the first of the AUVSI Foundation student competitions to 'go global' with two fully operational venues on opposite sides of the planet.
The IARC has set many milestones over the past 32 years by moving the state-of-the-art in aerial robotics forward on several occasions through its nine missions that were “impossible” at the time they were first proposed. Further, the IARC has been instrumental in bringing AUVSI and the field of aerial robotics to the forefront of cultural awareness through not only mass media such as the various Discovery and Scientific American specials which have focused on the IARC, but also through its reach to over one BILLION people in 2015 as it was televised across all of Asia by China Central Television (CCTV).
Students from prestigious universities such as the Massachusetts Institute of Technology, the Georgia Institute of Technology, Carnegie Mellon University, Nanjing University of Aeronautics & Astronautics, Stanford University, California Institute of Technology, and Tsinghua University, to name but a few of the many that have participated in the IARC over the years, have seen the IARC affect their lives significantly:
IARC's seven

Completed by Stanford University
The initial mission started in 1991 with the goal of moving a metallic disc from one side of an arena to another with a completely autonomous flying robot. This was seen by many as almost impossible for a fully autonomous flying robot. The college teams continued to improve their entries over the next two years. During that time, the competition saw its first autonomous takeoff, flight, and landing by a team from the Georgia Institute of Technology. Three years later, in 1995, a team from Stanford University was able to acquire a single disk and move it from one side of the arena to the other in a fully-autonomous flight half a decade earlier than some pundits had predicted.

Completed by Carnegie Mellon University
The competition mission was then toughened and made a bit less abstract by requiring teams to search for a toxic waste dump, map the location of partially buried, randomly oriented, toxic waste drums, identify the contents of each drum from the hazard labels found somewhere on the outside of each drum, and bring a sample back from one of the drums; all without any human intervention whatsoever. In 1996, a team from the Massachusetts Institute of Technology and Boston University, with backing from Draper Labs, created a small fully autonomous flying robot that repeatedly and correctly mapped the location of all five of the toxic waste drums, and correctly identified the contents of two from the air, thereby completing approximately seventy five percent of the mission. The following year, an aerial robot developed by a team from Carnegie Mellon University completed the entire mission.

Completed by Technische Universität Berlin
The third mission began in 1998. It was a search and rescue mission requiring fully autonomous robots to take off, fly to a disaster area, search for survivors and the dead amid raging fires, broken water mains, clouds of toxic gas, and rubble from destroyed buildings. The scenario was recreated at the U.S. Department of Energy's Hazardous Material Management and Emergency Response (HAMMER) training facility where these hazards could be recreated. Because of the realism of the scenario, animatrons were used instead of human actors to simulate survivors that were incapable of extracting themselves from the disaster area. An aerial robot from Germany's Technische Universität Berlin was able to detect and avoid all of the obstacles (many of which could have destroyed the robot itself), identify all the dead on the ground and the survivors (distinguishing between the two based on movement), and relay pictures of the survivors along with their locations back to first responders who would attempt a rescue.

Completed by the Georgia Institute of Technology
This mission involved flying to an abandoned village from a distance of 3 kilometers and identifying a particular structure based on a symbol on the building. Once the structure has been identified, a sensor probe had to be sent into the structure to perform reconnaissance and return video of a particular item of interest. Access to the structure was be through open portals (doors, windows, other openings) that had to be identified by the aerial robots. The total number of portals was not known beforehand. Operation within the structure was required in order to access the desired target. The robot had to relay clear images of the desired target back 3 kilometers to the judges. After seven years of steady progression, a team from the Georgia Institute of Technology completed the entire mission.

Completed by the Massachusetts Institute of Technology
The fifth mission picked up where the fourth mission left off by demonstrating the fully autonomous aerial robotic behaviors necessary to rapidly negotiate the confined internal spaces of a structure. This was a logical next step since the previous mission required a vehicle to enter a building. The nuclear reactor complex explosion scenario of the fourth mission was used as the backdrop for the fifth mission. The fifth mission required a fully autonomous aerial vehicle (presupposed to have been launched from a "mothership" just outside the structure as demonstrated during the fourth mission) to penetrate a structure and negotiate a more complex interior space containing hallways, small rooms, obstacles, and dead ends, in order to search for a designated target without the aid of global-positioning navigational aids. Finally, the aerial robot had to relay pictures of the nuclear control panel to a monitoring station some distance from the structure.

Completed by Tsinghua University
Mission 6 continued where Mission 5 ended but increased the difficultly by requiring the autonomous robots to interact with their environment. The robots had to locate an opening in a building, enter when a surveillance camera was not looking, navigate crowded hallways, avoid or disable security systems, interpret signage in Arabic, and finally reach a particular room without bumping any walls or landing. From there, the robot had to locate a particular paper inbox containing a flash drive. It had to then retrieve that flash drive, replace it with an identical blank flash drive, and exit the building within a short time span. This mission saw the first dual-venue competition, with simultaneous events occurring in both the United States and China. After three years, a team from Tsinghua University repeatedly demonstrated the entirety of the mission.
Completed by Zhejiang University
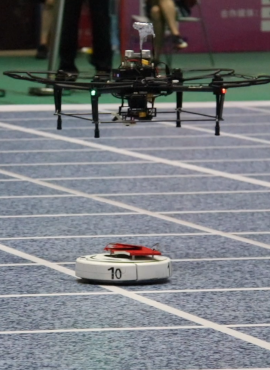
Mission 7 took a monumental leap by requiring autonomous aerial robots to interact with and control autonomous ground robots. Teams were tasked with developing systems to herd ground robots out one end of an arena in the absence of 3D cues such as walls. The ground robots could only be interacted with by touch. A top touch would command a 45° clockwise turn and a blocking action would result in a 180° turn. To complicate matters, the ground robots do a 180° turn every 20 seconds and add up to 15 degrees of trajectory noise every 5 seconds. The ground robots also impact one another and quickly devolve into non-deterministic travel. In the midst of the arena were four obstacle robots to complicate navigation and obstacle avoidance. The aerial robots had to dynamically determine a best course of action to keep the ground robots from exiting on three of four sides of the arena. In the top performances, which were replicated multiple times, the Zhejiang University team showed that its autonomous aerial robot could track individual ground robots, redirect them in either 45° or 180° increments while at the same time staying within the arena boundaries and avoiding the mobile obstacles circulating within the arena.

Completed by Nanjing University of Aeronautics & Astronautics
Mission 8 of the International Aerial Robotics Competition focused on demonstrating technologies involved with Man-Unmanned Machine-Teaming (MUMT). In particular, a single human was to communicate navigation commands by either gesture or vocal commands to a team of up to four fully autonomous aerial robots. Key behaviors to be demonstrated are fully autonomous flight, execution of verbal or gesture commands from a single human, and deciphering and assembling noise-corrupted segments of a QR code to reveal an “unlock code” which must be communicated to the human team member.
The man-unmanned team must complete its task in under 8 minutes while being attacked by Sentry aerial robots that can disable the human with 10 or more laser hits. The unmanned aerial robot team can “heal” up to 4 laser hits when commanded to do so.

Completed by Norwegian University of Science and Technology
Mission 9 of the International Aerial Robotics Competition involved the demonstration of technologies that enabled long distance rapid transport of heavy items, removal and replacement of tightly-integrated heavy objects on a moving platform by a fully autonomous air vehicle while in flight and in very close proximity to fixed and moving obstacles.
The round trip distance of 6 km and the substitution of a heavy electronics component had to be achieved in under 9 minutes.